
These conics meet at four real base points.
There are three degenerate conics:
- [t1:t2]=[1:0] The intersecting lines x2-y2=0,
- [t1:t2]=[0:1] The vertical parallel lines x2-1=0,
- [t1:t2]=[-1:1] The horizontal parallel lines y2-1=0.
To see how I rendered the conic sections in the picture to the left, Click Here to see a "side view," showing the cones in xyz-space, whose intersection with the plane z=1 (the top of the box) is shown in the two-dimensional figure.

 Linear
systems of plane curves
Linear
systems of plane curves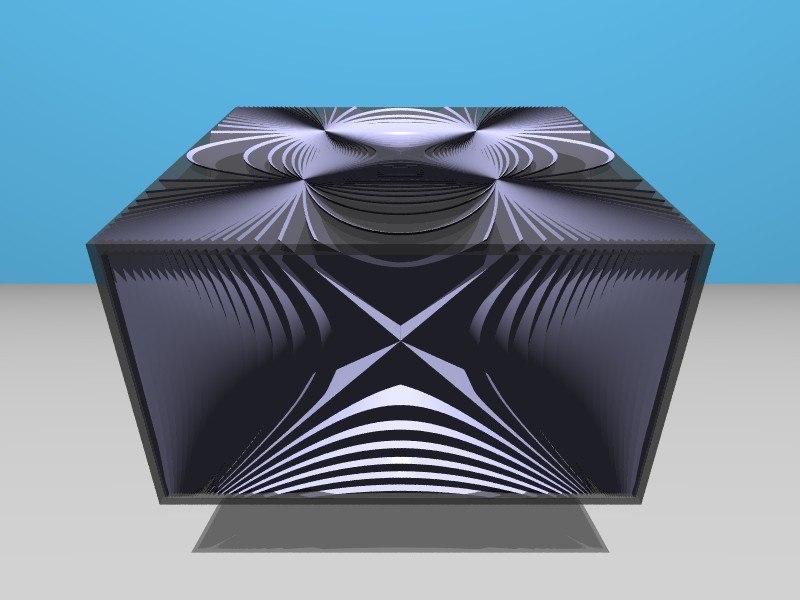{kind=link}